Я пытаюсь отследить положение робота с помощью веб-камеры над головой. Однако, поскольку у меня нет большого доступа к роботу или окружающей среде, поэтому я работал со снимками с веб-камеры.
У робота есть 5 ярких светодиодов, расположенных стратегически, которые достаточно отличаются по цвету от робота и среду, чтобы легко изолировать.
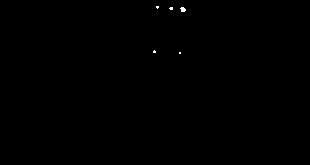
Я смог сделать это с помощью EmguCV, в результате чего получилось бинарное изображение, подобное приведенному ниже. Теперь мой вопрос: как мне получить положения пяти капель и использовать эти положения для определения положения и ориентации робота?
Я экспериментировал с классом Emgu.CV.VideoSurveillance.BlobTrackerAuto, но он упрямо отказывается обнаруживать капли на изображении выше. Будучи немного новичком, когда дело доходит до всего этого, я не уверен, что я мог делать неправильно.
Итак, как лучше всего определить положение капель на изображении выше?